
2021年3月23日
世界の研究者と“共創”で挑むロボット研究
~仮想空間内でロボットを動かすシミュレーターを開発し公開~
トヨタ自動車(以下、トヨタ)未来創生センターでは、「すべての人に移動の自由を提供」することを目指し、人と共存するロボットの研究に取り組んでいます。またその研究方法は世界中の多くの研究者との自由闊達な参加型の連携、いわゆる「共創型研究」を取り入れています。今回はロボット開発において、なぜトヨタが共創型研究に取り組むのか、その理由と最新の研究内容について、メンバー(橋口、横地)に話を聞きました。
どんなロボットの研究?
― トヨタでは数種類のロボットの研究をしていますが、今回紹介するロボットについて教えてください
橋口:今回ご紹介するロボットは、生活支援ロボットHuman Support Robot(以下、HSR)*1です。HSRは、生活空間内で人と共存しながら自ら動き、また物体を認識し、掴むこともできます。自律動作に加えて遠隔からの操縦も可能です。HSRの利用シーン例は下図の通りです。みなさんも生活している中で「ちょっと誰かに手伝ってほしい」と思うことがあると思います。特に自分一人で日常生活を送ることが困難な方や、忙しい日常を送られている方にとって、このような支援は、より切実に望まれていることだと思います。
私たちは2012年にこのHSRを発表し、ロボットとの共存社会の実現を目指し、日々、研究に取り組んでいます*2。

HSRのソフトウェア、および、シミュレーターの開発を担当。薩摩人
-
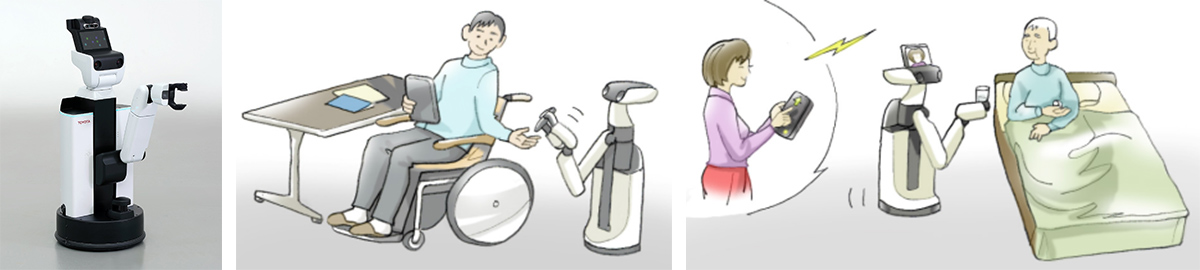
HSR(左)とその利用シーン例
― HSRの研究の難しさについて教えてください
橋口:人の生活空間のように「常に変化する環境の中で、ロボットにモノを取ってきてもらう」というタスクを例に考えてみます。まず、ロボットは雑然とした環境の中、周囲を認識して目標物を発見しなければなりません。そして時々刻々、状況を認識しながら「どのように移動し、腕を伸ばし、指で掴むのか」すべてを判断し、行動する必要があります。このように人にとっては単純な動作でも、ロボットにとっては非常に多様で複雑なタスクが必要で、現時点で人並みにスムーズかつ確実に実行できるロボットは実現されていません。
この難題を解決するため、トヨタは多くの研究機関と連携できるよう2015年に「HSR開発コミュニティ」を立ち上げ、共創型研究を取り入れました*3。
― “共創型研究“とは、実際にどのように進めているのでしょうか?
橋口:HSR開発コミュニティでは、世界中の多くの研究者がHSRを共通の研究プラットフォームとし、主にHSRを動かすソフトウェアの研究をしています。現在のHSR開発コミュニティ参加機関は国内外13カ国44拠点です。そして各拠点では「人との共存環境で人の生活を支援するロボットの実現」という目標に向けて、自由に研究テーマを設定。その研究成果は、論文、オープンソースソフトウェア*4(以下、OSS)、ロボット競技会などにより公開し、知識を共有しています。私たちも自分たちが開発したHSRのソフトウェアや研究成果を公開し、コミュニティの方に活用頂いております。
オープンソースソフトウェアでの仲間づくり
― 最近、重点的に取り組んだ研究について教えてください。
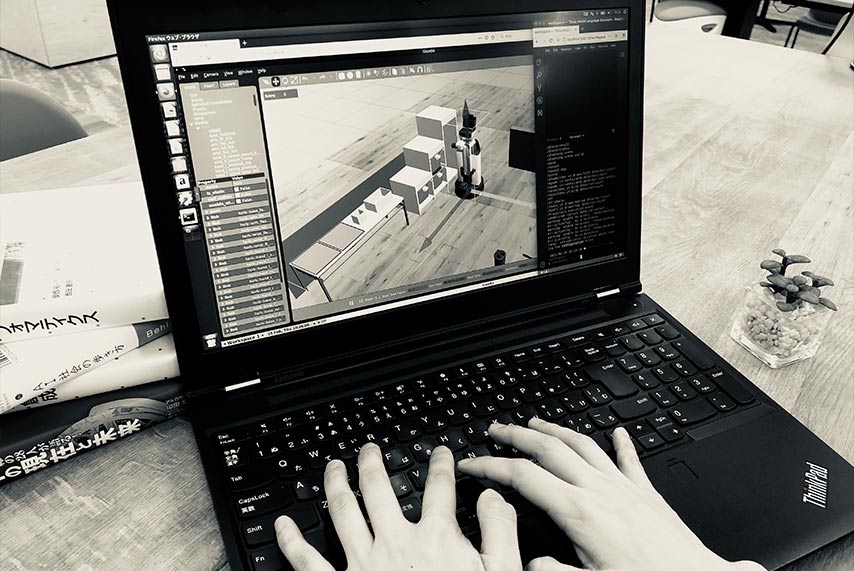
橋口:さらにより多くの方に使ってもらうために、これまでコミュニティユーザー内で使っていたHSRシミュレーターをベースに、株式会社MIDアカデミックプロモーションズ(所在地:千葉市稲毛区)とともに、仮想空間内でHSRを動かすシミュレーターを開発し、OSSとして公開しました*5。HSRシミュレーターをOSSとして公開した理由は、HSR実機がなくてもパソコンさえあれば、いつでも、どこででもHSRのソフトウェア研究ができるからです。
今回公開したHSRシミュレーターには国際ロボット競技会World Robot Summit(以下、WRS)のルールブックに準拠した競技場があらかじめインストールされており、自分がプログラミングしたソフトウェアを実行すると、競技ルールに則って自動採点されます。自動採点により、アルゴリズムの良し悪しの比較が容易となるため、研究への活用はもちろんのこと、シミュレーターによる競技会やロボットソフトウェアの教育ツールなど、さまざまな活用が期待されます。
-

World Robot Summit(WRS)の実機競技 引用元:NEDO -
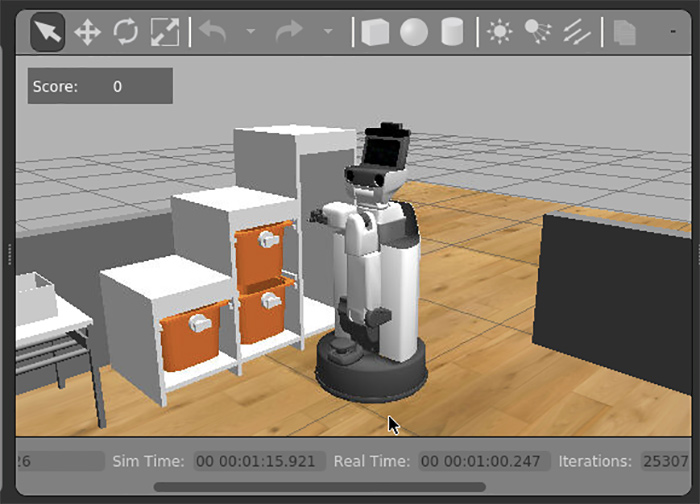
HSRシミュレーター(WRS競技場環境)
― HSRシミュレーター公開の反響はありましたか?
橋口:新型コロナウイルス感染拡大防止に伴い、ロボット競技大会への現地参加が難しくなっている中、国内ロボット競技会のひとつ「RoboCup JapanOpen2020」(主催者 NPOロボカップ日本委員会、開催日2020年10月30日~11月1日)にてHSRシミュレーターを用いた競技*6がオンラインで開催されました。HSRシミュレーターを起用した競技は初開催だったにもかかわらず国内外から9チームが参加しました。研究者や大学生の参加が多い中、普通科高校の一年生が参加するなど、従来にはない広がりが見られました。また一部の大学では、授業への活用も始まっています。
-
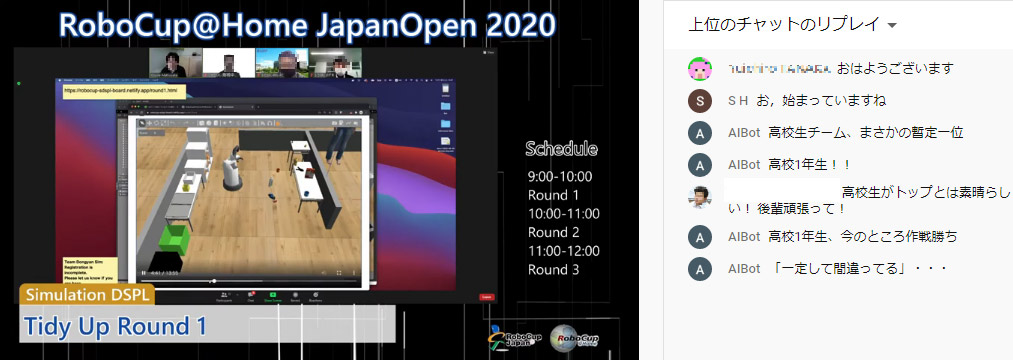
RoboCup JapanOpen2020 @Home シミュレーションの様子 引用元:ロボカップ日本委員会
― OSSとして公開するために、どのようなステップを踏んでいったのでしょうか?
横地:OSSとして世の中に公開するためには、私たち自身がOSSのルールや文化を学び公開するプロセスを定め、それを守っていく必要があります。そのため国際規格(ISO)*7に基づき、OSSに関する社内教育やOSSとして公開するための社内プロセスを定めました。ISOに準拠したプロセスに沿って公開した最初の例がHSRシミュレーターです。

OSS管理体制の構築をHSRシミュレーターのOSS化を通じて推進。ジョギングで体力づくり
今後の目標について
― 最後に、今後のOSS推進やHSR研究の目標を教えてください
横地:ロボット研究におけるOSS活用は今後ますます増えると思います。このとき自分達の利益だけを求めるのではなく、多くの方の利益のための活動であることも忘れずに、OSS公開や活用を進めていきたいと思います。
橋口:HSRのような生活空間で人の生活を支援するロボットの実用化には、更に研究を進めるのと同時に、幅広い人に関心を持っていただくことが大変重要だと思っています。これからも国際競技や学会活動、共同研究、実証実験など、目標を同じくする仲間とのオープンな連携を通して研究を進めていきたいと思います。
-

HSR開発の仲間たち
参考情報
- *1:
- Development of Human Support Robot as the research platform of a domestic mobile manipulator
https://robomechjournal.springeropen.com/articles/10.1186/s40648-019-0132-3 - *2:
- トヨタ自動車、家庭内での自立生活をアシストする生活支援ロボットを開発
https://global.toyota/jp/detail/1558047 - *3:
- トヨタ自動車、生活支援ロボットの実用化に向けて研究機関等と技術開発を推進するコミュニティを発足
https://global.toyota/jp/detail/8709536 - *4:
- 利用者の目的を問わずソースコードを使用、調査、再利用、修正、拡張、再配布が可能なソフトウェアの総称
- *5:
- https://github.com/hsr-project/tmc_wrs_docker/blob/master/README_ja.md
- *6:
- https://qiita.com/yosuke@github/items/17842508579b3561f048
- *7:
- ISO/IEC 5230 オープンソースに関する法令遵守のための国際規格。トヨタは世界で初めてISO/IEC5230認証を取得
https://www.openchainproject.org/news/2020/12/15/toyota-iso-5230(英文のみ)
本件に関するお問い合わせ先
未来創生センター
メールアドレス:xr-probot@mail.toyota.co.jp✉