
2022年2月2日
AI研究7年目社員:シリコンバレーで学んだ研究開発
こんにちは!トヨタ自動車 (以下、トヨタ) 未来創生センターの西谷です。トヨタでは、若手社員が国内外の関連会社や教育機関に1~2年に赴任して修行する「修行派遣プログラム」(以下、修行派遣)と呼ばれる制度があります。今回の記事では、私、西谷が入社4年目に経験したアメリカ・シリコンバレーにあるToyota Motor North America, InfoTech Labs1 (以下、InfoTech) での修行派遣についてご紹介したいと思います。
修行派遣のきっかけ
私は2015年にトヨタに入社し、未来創生センターの前身であるFP部 (当時) に配属され、そこから3年間、制御ソフトの検証技術について研究してきました。開発した技術 (図1) の現場適用や実走行データを用いた検証技術2の研究開発を進めるにつれて、「人間が知見を得て考えるというフェーズは、データサイエンスの技術によって大きく前進させることができる」と考えるようになり、そのような技術を身につけていきたい、というキャリアプランを上司と共有していました。すると入社3年目のタイミングで、上司から「アメリカ・シリコンバレーにあるInfoTechという関連会社では、最先端のデータサイエンスを扱った研究開発をしている。修行派遣を利用して、技術や働き方を学んできたら?」と話をいただき、2018年6月から1年間のアメリカ赴任が決定しました。
修行派遣では、若手社員がグローバルに活躍していける力を身につけるため、異なる文化・言葉・環境のなかで、現地での生活立ち上げから派遣先での研究開発まで経験します。今回は初の海外生活ということもあり、様々なチャレンジや学びがありましたが、今回はその中でも「現地の働き方」と「AI研究」についてお話ししようと思います。
-
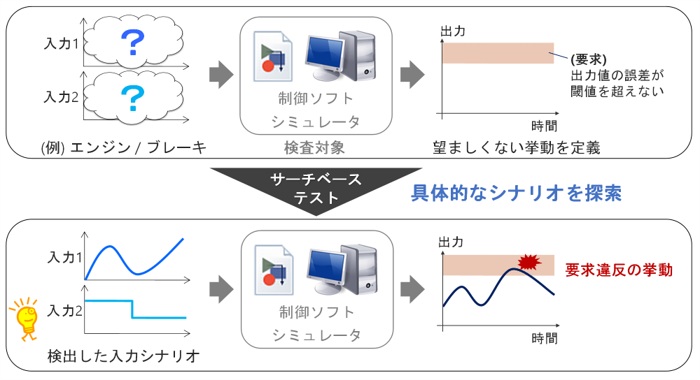
図1:開発した検証技術 SBT (サーチベーステスト)
シリコンバレーの研究開発
派遣先のInfoTechでは、コネクティッド技術の研究開発を行っており、将来の社会で役立つIT技術を創り出しています。今回の研修では知能化情報処理チームに加わり、深層強化学習を用いた車両合流制御システムの研究に取り組みました。
InfoTechでの働き方ですが、私の場合は9時頃に出社し、まず社内のカフェテリアでコーヒーを飲み、そこから研究を進めたり、実車を改造したり、メンバーと打合せしたりして、夜7時頃に帰宅していました。InfoTechは成果が出ていれば働き方の自由度は高く、中には日の明るいうちに帰宅して家族や友人と過ごすメンバーも多くおり、日本とは異なる平日の過ごし方が印象的でした。
研究開発のスタイルも、これまで私が未来創生センターで経験したものと大きく異なりました。当時の未来創生センターでは、念入りな打合せによりチームの合意を得て、計画を練ってから研究を実施していました。このような進め方は、長期目線でムダのない研究を実施できるという利点があります。一方InfoTechでは、図2に示すような研究開発のサイクルが非常にスピーディーに回っていました。InfoTechでも当然計画は立てますが、綿密な計画をたてるよりも「動くモノを見て議論しよう」「動くモノを見せて客観的なフィードバックを貰おう」という考えのもと、手早くPoC (Proof of Concept) を作成してデモを実施していきます。これにより、変化の激しいIT分野において、価値ある研究を素早く柔軟に実施することが可能になります。InfoTechでは様々な領域のエキスパートが同じ研究チームにおり、彼ら彼女らが一斉に手を動かすため、アイデアが創出されてから次の週にはPoCができていることもあります。このスピード感が実現できるのは、転職やレイオフが身近なシリコンバレーにおいて、専門性を身につけて成果を出し続けることがスタンダードになっていることも影響しているように思います。
-

図2:InfoTechの研究開発スタイル
また、様々な意見をオープンに受け入れる姿勢も印象的でした。図2に示す研究サイクルでは各フェーズでメンバーがディスカッションしていますが、その活発な様子に圧倒されたことを覚えています。議論の雰囲気は楽しく明るく否定せず、自身の意見を次々と乗せていくような形で進み、まとめきれないほどのアイデアが生まれていきます。様々な人が行き交うシリコンバレーでは「相手の意見を尊重すること」を第一に考える文化があり、それが無益な対立を避け、有益な議論を活性化している要因になっているように思います。
この1年間の研修を通して、これまでの働き方とは異なる、価値ある技術を素早く形成していく研究の進め方を身につけることができました。
AI研究の概要
InfoTechで開発した車両合流制御システムDeep Merging3の技術について、ご紹介したいと思います(論文はこちら)。所属していた知能化情報処理チームでは、コネクティッドカーが普及した未来の社会を見据えた様々な研究を行っており、そのような社会で実現できる車両制御技術の一つとして、本テーマを担当しました。
車社会が抱える問題の一つに「渋滞」があります。例えば高速道路の合流車線にいる車は、本線へ強引な合流をしてしまうと交通流へ悪影響を与えてしまい、渋滞を引き起こしてしまう可能性があります。そのため本研究では、交通流への影響を考慮しながら合流効率を向上させる車両制御システムDeep Mergingを開発しました。
Deep Mergingでは、AIが試行錯誤を繰り返すことでより賢い行動を学んでいく「深層強化学習」と呼ばれる技術を用いて合流制御を実現しています。具体的には、現実的な交通流を模擬したシミュレータを用いて合流シーンを何度も繰り返すことで、交通流への影響を考慮した賢い合流速度制御を学習していきます(図3 a)。このシステムでは、入力として合流区間の画像を使用し、深層強化学習のニューラルネットワークによって各アクションを評価することで、目標車速を出力します(図3 b)。さらに、このネットワーク構造に「自車速度を推定する補助タスク」を埋め込みネットワークとして追加することで、学習の早い段階で自車の動きに注目させて学習スピードと性能を向上させる手法を提案しました。
-
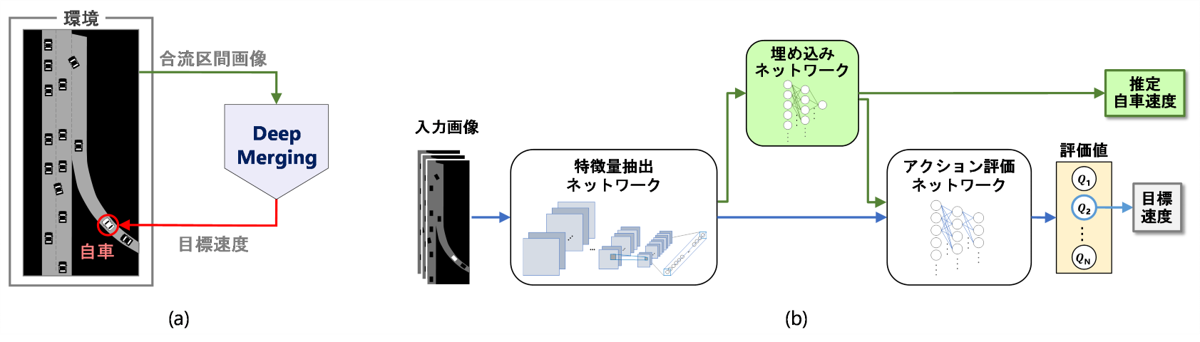
図3:深層強化学習を用いた速度制御システムDeep Merging; (a) システム概要, (b) ネットワーク構造
その結果、Deep Mergingを適用することで、交通流への影響を最小限に抑えながら合流効率を大幅に向上させることを確認でき、この成果について、ロボティクス分野のトップ国際会議の一つであるICRA (International Conference on Robotics and Automation) で発表することができました。ICRA 2020はコロナ禍の影響で本来のパリ開催からオンライン開催となってしまいましたが、発表や参加者との交流を通じ良い刺激を受けることができました。
今回ご紹介したDeep Mergingは当時大きく注目を浴びていた深層強化学習を用いていますが、赴任当初はディープラーニングも強化学習も、何も分からない状態から研究をスタートしました。1年間で国際学会へ成果発表できるレベルまで成長することができたのは、現地の上司が熱意を受け止めて経験のない若手にも研究テーマを任せてくれたこと、そして、現地のチームメンバーが研究の推進をサポートしてくれたことがとても大きかったと思います。
未来創生センターでの働き方
帰国後は再び未来創生センターの制御ソフト検証技術の研究開発チームに戻りました。私はトヨタ記念病院内の搬送ロボットの開発チームと連携してソフト開発に検証技術を適用する業務を担当し、現在まで継続しています。この連携では開発現場が求めるニーズに柔軟に対応し、「現場にとって価値のある技術をスピーディーに提供する」ということが重要になってきます。
このようなチャレンジにおいては、シリコンバレーで学んだオープンかつスピーディーな研究開発スタイルが有効に働き、アジャイルな開発を可能にします。具体的には「動くソフトをつくる」ことで現場からオープンにフィードバックをいただき、そのフィードバックを「ソフトに反映させる」というサイクルをスピーディーに回すことで、価値ある技術を提供し続けています。その結果、ロボットの機能開発のスピード向上に貢献することができました4。
また帰国後の未来創生センターでは、働き方改革によってアジャイルな開発とオープンなコミュニケーションがより活発になってきました。これによって開発現場と要素研究がつながるようになり、研究成果を現場に適用するプロジェクトが増えてきています。
人づくりから創造する未来
今回は入社4年目に経験した修行派遣におけるシリコンバレーの研究開発についてご紹介させていただきました。トヨタの理念にある「モノづくりは人づくり」という言葉が表すように、トヨタには社員一人ひとりが思い描くキャリアプランを支援する環境があります。また未来創生センターには、最先端技術を研究できる環境と多様な社会課題に取り組む開発現場があり、未来を自らの手で創造していくことができます。サイト内では私たち未来創生センターがつくる未来の研究について発信していきますので、これからも是非チェックしてみてください。

著者:西谷 一平
2015年入社。制御ソフト検証技術の研究開発に従事。現在は開発プロセスを加速させる新技術の開発や様々な開発現場への技術適用を担当。アメリカ赴任では月一で旅行にいき、大自然を楽しむ。写真はイエローストーン国立公園のモーニンググローリープール。
参考文献
- 1.
- InfoTech Labs (ITL) – AMRD
- 2.
- 西谷一平, 山口智也, 加賀智之. 2018. 実走行データを活用した制御システム自動検証手法の開発. 自動車技術会論文集 49.1.
- 3.
- Ippei Nishitani, Hao Yang, Rui Guo, Shalini Keshavamurthy, and Kentaro Oguchi. 2020. Deep Merging: Vehicle Merging Controller Based on Deep Reinforcement Learning with Embedding Network. In 2020 IEEE International Conference on Robotics and Automation.
- 4.
- トヨタの未来を創る「数理データサイエンス&ロボティクス」の研究と実証試験に迫る(TECH PLAY Magazine)